There is a very nice write up about 1 Bit Squared and its founder Piotr Esden-Tempski in the local Register Guard Sunday newspaper.

Photo credit: Andy Nelson with The Register-Guard
A Eugene man builds the brains to control tiny aerial vehicles
By Dashiell Paulson The Register-Guard
In technology circles, small flying robots, commonly called Unmanned Aerial Vehicles, are hailed as potentially the next global growth industry. But UAVs could be surpassed by, or perhaps work in tandem with, the even smaller MAVs or micro aerial vehicles, many of which can fit in a coat pocket or a desk drawer.
Eugene based 1 Bit Squared is the source of what company founder and owner Piotr Esden-Tempski believes to be the world’s smallest commercial autopilot for these kind of miniature drones.
Sitting in 16 Tons Cafe, Esden-Tempski reaches into his backpack and pulls out a toy drone with four rotors, called a quadcopter, that’s only as big as his hand.
“This kind of drone is available at most big retail stores now,” he said. “It’s cheap, a toy. I use it to test my products.”
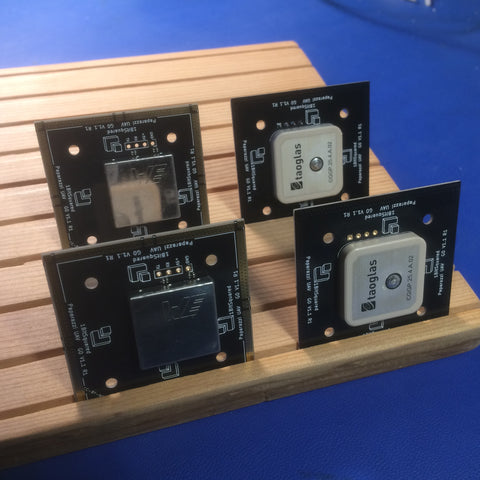
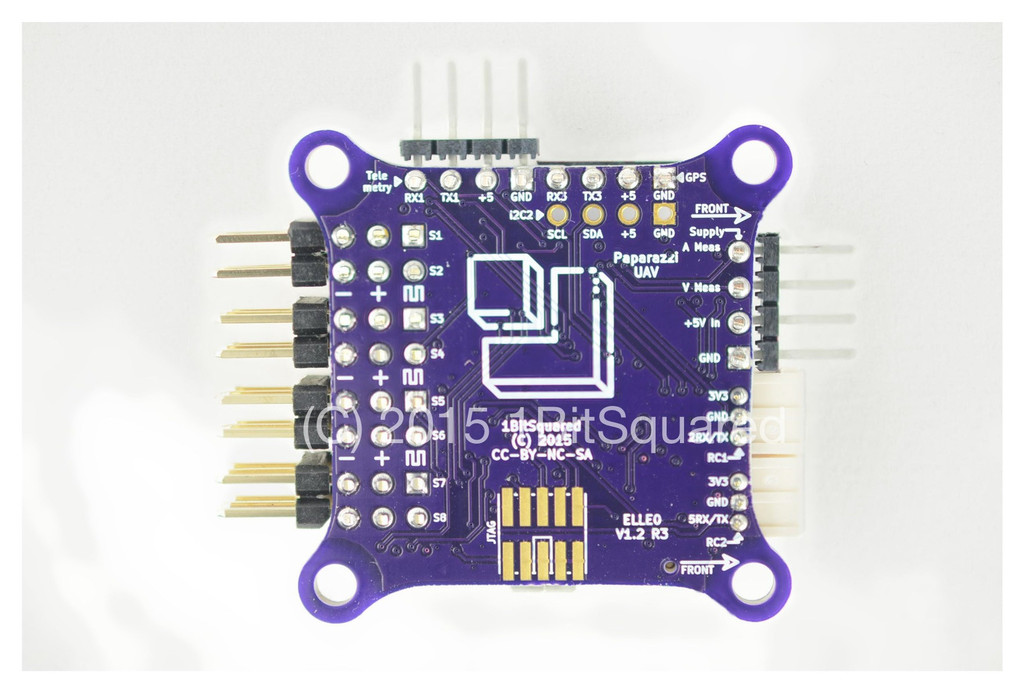
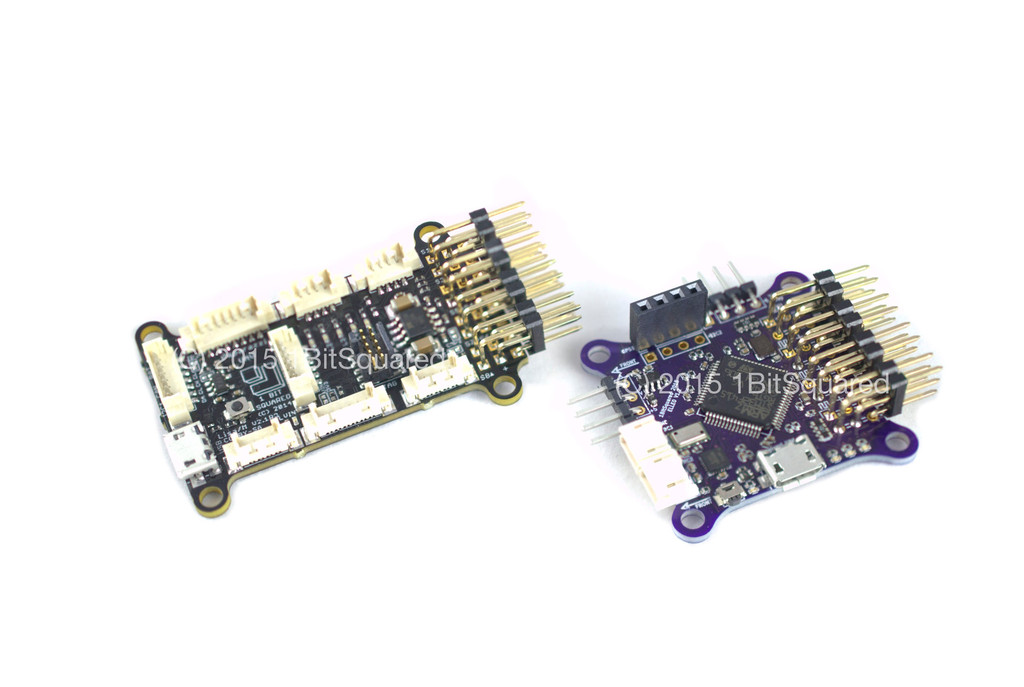
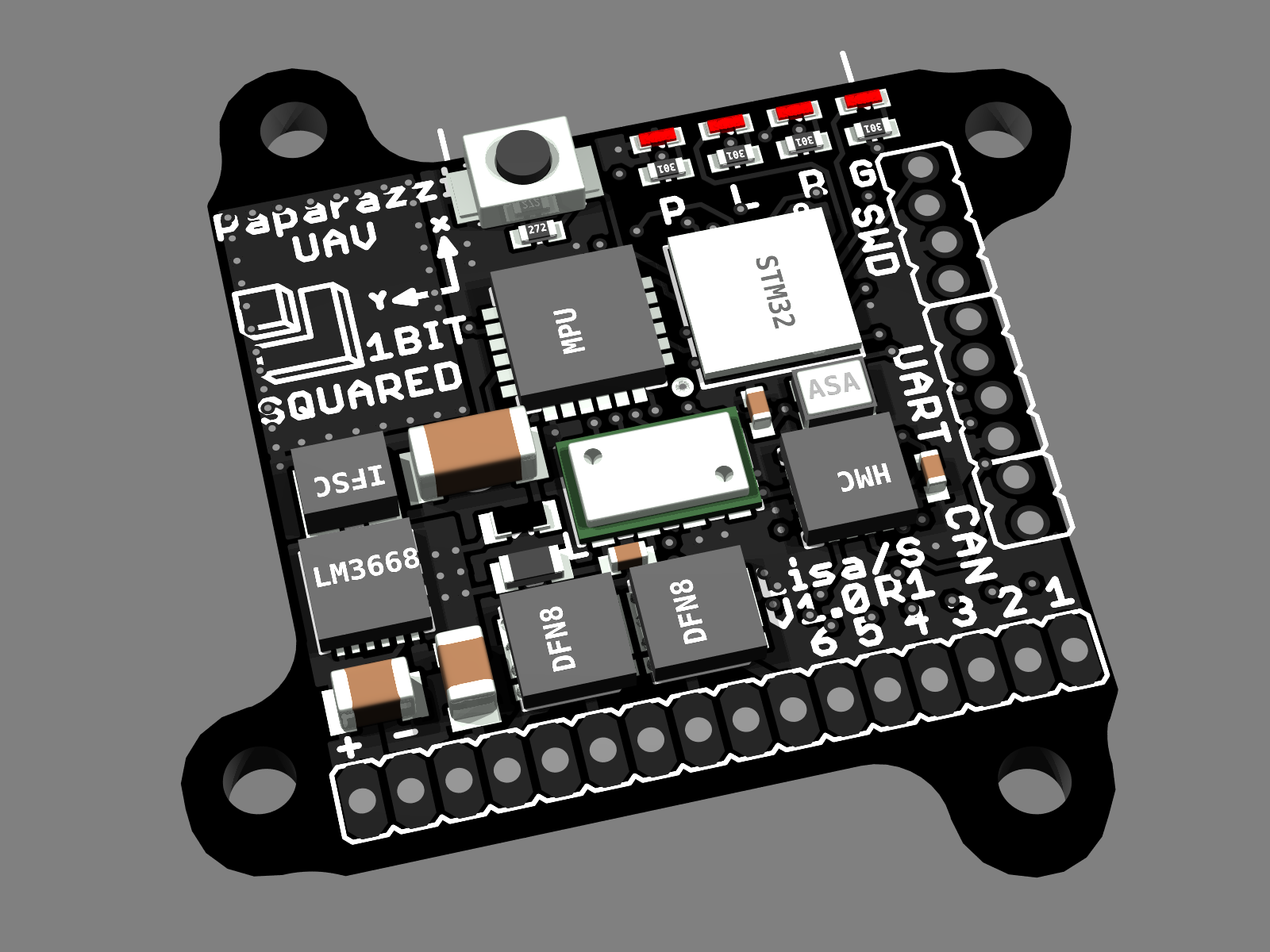
The heart of the drone is the $300 Lisa/S circuit, a 1.9 gram, 2-by-2 centimeter circuit board that derives its marketability not only from size but its many functions. The chip has GPS, a radio for RC control and telemetry, a barometer, a 3-axis gyroscope, and drivers that control the rotors. Only the U.S. military has hardware that can compare with, or surpass it, in terms of size and function, Esden-Tempski said. (The U.S. Black Hornet drones, for example, are only as big as a person’s thumb, according to various media reports).
Esden-Tempski runs 1 Bit Squared with help from his wife, Danika. The company doesn’t build drones, rather, it creates the brains that control the drones — specializing in autopilots, development and drone programming. The company targets “the emerging personal nano UAV market for advanced hobbyists, as well as university and civilian research programs,” according to its website.
Esden-Tempski declined to divulge profits and revenues for his company, but said he sells about 30 Lisa/S circuits globally, per month, along with a variety of other hardware pieces and consulting services.
As far as he knows, 1 Bit Squared is the only company of this type in the Eugene-Springfield area.
“I tried to look for Oregon companies,” Esden-Tempski said. “There might be some here, but I’m not aware of them. I found one in Bend, but they build complete systems for agriculture.”
Started as experiment
Esden-Tempski said he started 1 Bit as an experiment, to find out how much demand there might be for his tiny circuit.
“I felt very confident that this was something not on the market before, so I wanted to try and push it to maturity,” he said.
From the beginning, 1 Bit’s main clients have been universities and researchers, which make up about 30 percent of 1 Bit’s customer base, Esden-Tempski said.
He began working on the Lisa/S in 2012, in collaboration with researchers at the Delft University of Technology in Holland (TuDelft).
Before that, Esden-Tempski had worked closely with other UAV developers, especially Paparazzi, an open source project for drone enthusiasts to build autopilots and hardware as a community.
As an open source project, Paparazzi eschews patents, preferring to make the designs and programming freely available to users.
“Tudelft reached out to me because of my involvement with the Paparazzi project,” Esden-Tempski said. “They were interested in hiring me on a consulting process.”
The faculty wrote the programming for the circuit while Esden-Tempski designed the hardware. “I produced the prototypes and chose the parts,” he said.
In the summer of 2013, development of the Lisa/S software was complete, winning plaudits for TuDelft in tech circles. Because Esden-Tempski designed the circuit, he was able to manufacture and sell them through 1 Bit.
The way the business works is Esden-Tempski buys specific components from U.S. companies and printed circuit boards from China. He then has the parts assembled at Corvallis-based Reliance CM. Esden-Tempski said he is choosy about the parts he uses and who puts them together.
“Even with the design files and the software you need to have the necessary tools” he said. “You need to know where to source parts, what manufacturer to hire, what additional requirements to specify.”
So far, he said, the company he created is on track to meet his objectives.
“It’s matched my expectations” Esden-Tempski said. “It’s the first generation of the hardware and there’s a lot of additional room for development. I want the company to expand slowly and eventually add employees.”
MAVs’ smaller size makes them better suited to indoors, where drones as big as a laptop can be cumbersome — a major advantage as pressure to regulate drone usage outdoors in public spaces increases.
“The advantage of my stuff is its pretty small,” Esden-Tempski said. “So people can fly it around their house.”
Numerous applications
That’s an exciting prospect for Michel Kinsy, an assistant professor in the Department of Computer and Information Science at University of Oregon and director of its Computer Architecture and Embedded Systems Lab.
“There are a lot of applications for MAVs,” Kinsy said. “If you send a lot of them they can cover a wide area, they can collect a lot of detail, go to places where a large UAV could not go. One of the long term visions I have is a large UAV platform with lots of micro UAVs on it. That big one would act as a mothership, recharging the MAVs and getting them there and home.”
Kinsy recently invited Esden-Tempski to join his team at the UO as a research assistant.
“This is win-win for all of us,” Kinsy said, “Piotr is the perfect fit. He will give our research more direction and let us know what’s practical. We can know better what other people are already doing.”
Kinsy is keen to develop patents out of the collaboration, with usage rights split between the university, the members of the research team, and 1 Bit Squared.
Esden-Tempski is bringing his product to market at a time when drones are taking off in Canada and Europe.
Commercially, the aerial robots can be used for a plethora of purposes. They have already been used to examine rooftops, monitor crops, conduct search and rescue, check power lines, film movies, cover news events and sports, detect forest fires, deliver packages, count inventory, deliver supplies to disaster zones, and track wildlife, among other things.
In the United States, UAVs have faced more opposition, including mistrust of their purposes by the general public and tight regulation by the Federal Aviation Administration.
Their usage in the U.S. often has been publicly linked to military weapons and critics have openly worried that UAVs can be used to spy, invade privacy, smuggle drugs, stalk celebrities, mimic cellphone towers and steal personal information, or, in military usage, kill people.
The Federal Aviation Administration has said it’s crafting safety rules and regulations for UAV commercial use. But the process has been slow, critics allege, and the FAA has continued a near prohibition on drones for any use beyond flying for pleasure.
“The laws in the U.S. for drones are horrible,” Esden-Tempski said. “That’s the only word for it, horrible.”
FAA restrictions
Congress has required the FAA to maintain a hands-off approach on hobbyists’ use of drones so long as the pilots play by the rules, including staying below 400 feet and away from manned aircraft.
But the federal agency has largely kept a tight lid on the business and research use of what it calls “unmanned aircraft systems.” Later this year, the FAA is expected to propose less restrictive rules governing the use of small drones that weigh less than 55 pounds. The rules for larger drones will follow later.
In the meantime, the FAA has aggressively pursued alleged violations of the current rules. In early November, the agency sent a warning to a North Carolina High School after students filmed the school’s Friday night football game with a drone, citing a prohibition against flying drones over large gatherings.
The FAA has widely cited concerns about public safety for the time spenting on crafting rules. Congress has given the FAA a deadline for new rules of September 2015.
Esden-Tempski said he doubts the FAA can make the deadline.
“They have no idea what they are doing,” he said. “They aren’t pilots. They regulate planes and big aircraft. I think the FAA are shooting the U.S. in the foot. The rest of the world is already using this technology.”
Despite the lack of commercial opportunities in the U.S., he said, 1 Bit still has lots of opportunities in the business realm internationally, Esden-Tempski said, as well as in the hobbyist market in the U.S.
“There’s still growth in the (domestic) hobbyist market,” he said, “but commercially it’s questionable.”
]]>